 1296
2020-11-25
1296
2020-11-25
环境响应型水凝胶,又称“刺激响应”或“智能”水凝胶,因其高的含水量、弹性、渗透性、外界刺激响应性和大的变形等优点,被广泛应用于生物医学、软体机器人等领域。目前,大多数智能水凝胶的响应变形均凭借凝胶体内和体外渗透压的变化。然而,在这种渗透驱动机制下,凝胶材料的驱动力和响应速度间相互矛盾,如图1所示。要解决这一矛盾,需要从分子尺度设计并提出一种异于传统“渗透型”水凝胶的非常规驱动机制。
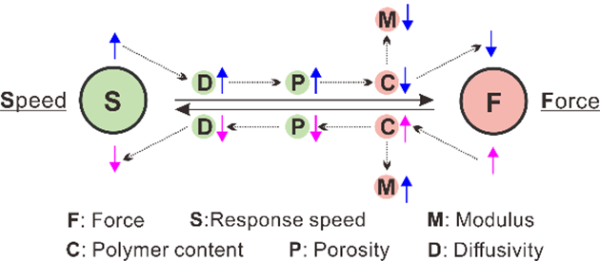
图1.传统渗透型水凝胶的力和速度之间的矛盾
近日,中国科学院兰州化学物理研究所研究员周峰团队与美国加州大学洛杉矶分校教授贺曦敏团队合作,通过仿生青蛙跳跃过程中肌肉的加速机制,提出一种非常规驱动模式(弹性驱动),解决了传统渗透型水凝胶驱动机制力和速度之间的矛盾,制备出一种强收缩高能量密度的水凝胶材料,如图2所示。与渗透驱动型水凝胶相比,弹性驱动型水凝胶具有侧链触发主链,主链自主收缩、弹性回弹,形变与网络中水分子的传输无关等优点,其收缩强度和能量密度分别高于渗透型水凝胶10倍和1000倍。

图2.仿生青蛙跳跃过程中的能量储存机制设计强收缩高能量密度凝胶材料
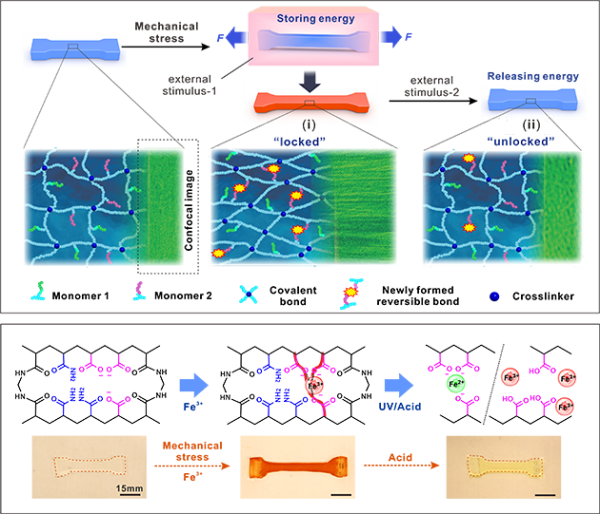
图3.基于羧酸和铁的配位和解配位的能量储存和释放方案
该研究解决了传统渗透型水凝胶长期存在的“速度和驱动力”之间的矛盾,克服了传统渗透型水凝胶材料的能量密度极限,甚至与生物肌肉(15 KJ/m3 Vs. 8 KJ/m3)相当;新驱动机制将化学能直接转换为机械能,减少了中间步骤热量产生和耗散,因而具有高的能量转化效率(49%);保持高响应速度的同时能够产生大的收缩力;可重复多次编辑,编辑方式多样,实现了可控的多稳态变形(各向异性或各向同性的变形)。

图4.强收缩力和高能量密度
该研究为设计和制备强收缩、高能量密度、多形变模式的水凝胶材料提供了新策略。研究工作以Bioinspired high-power-density strong contractile hydrogel by programmable elastic recoil为题,发表在Science Advances上。兰州化物所为论文的第一单位,博士马延飞、华牧天为论文的共同第一作者,贺曦敏、周峰为论文的共同通讯作者。此前,周峰团队发明了利用铁离子-羧酸根的强配位作用构筑超高机械强度和韧性的水凝胶体系(Advanced Materials);通过拉伸状态下固定分子构象制备出各向异性结构的水凝胶,将水凝胶的拉伸强度提升到40MPa(Small),为该课题奠定了基础。研究工作得到国家自然科学基金、中科院国际合作项目、国家重点研发计划,美国国家科学基金会等的支持。
上一篇: 沈阳生态所等在光降解研究方面取得进展
版权与免责声明:
(1) 凡本网注明"来源:颗粒在线"的所有作品,版权均属于颗粒在线,未经本网授权不得转载、摘编或利用其它方式使用上述作品。已获本网授权的作品,应在授权范围内使用,并注明"来源:颗粒在线"。违反上述声明者,本网将追究相关法律责任。
(2)本网凡注明"来源:xxx(非颗粒在线)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
(3)如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。

