 1198
2021-04-20
1198
2021-04-20
人工智能技术的发展为智能仿生感知系统的发展带来了革命性变化,也对器件和系统的高效信息处理能力以及舒适性、兼容性等提出要求。基于柔性神经拟态器件的柔性仿生感知系统能够以较低的功耗处理大量的信息,同时具有良好的曲面共形特征,在可穿戴设备、人机交互、智能机器人、医疗监测及运动康复等战略新兴领域具有广阔的应用前景。近年来,柔性人工突触器件作为系统中的关键器件,由于其特殊的处理器/存储器配置结构,以及高效率并行处理大量非标准化数据的能力,吸引了国内外研究人员的关注。
中国科学院苏州纳米技术与纳米仿生研究所的张珽研究团队围绕柔性智能感知领域,对面向智能仿生感知系统的柔性感知器件和柔性人工突触器件方面进行了探索,并取得了系列研究成果(Adv. Mater., 2014, 26, 1336;Adv. Mater., 2015, 27, 1370;Small, 2017, 1602790;Adv. Sci., 2018, 5, 1800558;Small, 2018, 14, 1703902;Adv. Mater. Technol., 2020, 5, 1900888;npj Flex. Electron., 2020, 4, 3;Microsyst. Nanoeng., 2020, 6, 84;Research, 2020, 8910692;Adv. Electron. Mater, 2020, 6, 2000306.)。
与典型的机电感知系统不同,生物的感觉器官能够对外界信息进行检测和处理,并将处理过的信号传递给大脑进行最后的信息判断,其能量消耗仅为几个fJ/spike量级。生物感知系统具有这些优势,神经突触在其中起着至关重要的作用,通过调节突触的权重来实现信号处理以及学习遗忘记忆等功能,是生物实现感知-信息处理的基础。因此,在柔性器件中实现突触行为,研究柔性神经形态电子学并将其应用于新型仿生神经形态感知系统,在硬件层面上模拟生物大脑和感知系统功能,有望实现与生物神经信号的兼容,构建智能、高效的智能感知系统和人机交互界面。
近日,研究团队在ACS Nano上撰写综述文章,对近几年国内外相关团队在基于人工突触器件的仿生感知系统领域的研究工作进行总结分析。总结和归纳了基于不同材料和结构的仿生人工突触器件,根据器件的不同结构、工作机制将其分类,概述了每一类器件中常用的材料及其工作原理,分析了不同类型器件的优缺点及应用场景;论述了基于人工突触器件的仿生感知系统,整理和探讨了触觉、视觉、嗅觉、味觉、痛觉及感觉运动系统等;讨论了基于人工突触器件的智能仿生感知系统面临的问题与挑战,展望了该领域的未来发展方向。
相关研究成果以Flexible Artificial Sensory Systems Based on Neuromorphic Devices为题,发表在ACS Nano(DOI: 10.1021/acsnano.0c10049)上。苏州纳米所博士研究生孙富钦为论文第一作者,研究员张珽为论文通讯作者,共同作者包括博士陆骐峰和副研究员冯思敏。研究工作得到国家重点研发计划、国家自然科学基金、江苏省杰出青年基金、中科院脑科学与智能技术卓越中心等的支持。
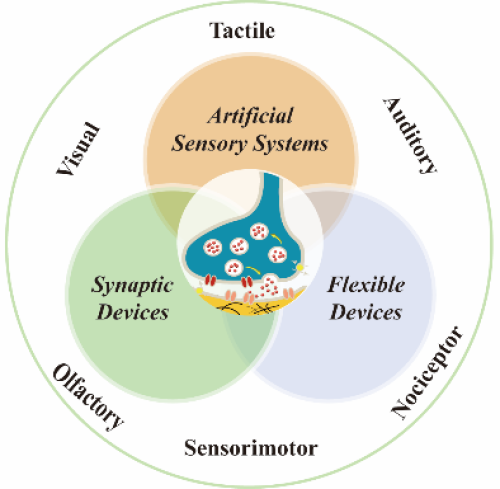
基于人工突触器件的柔性仿生感知系统
上一篇: 没有了
版权与免责声明:
(1) 凡本网注明"来源:颗粒在线"的所有作品,版权均属于颗粒在线,未经本网授权不得转载、摘编或利用其它方式使用上述作品。已获本网授权的作品,应在授权范围内使用,并注明"来源:颗粒在线"。违反上述声明者,本网将追究相关法律责任。
(2)本网凡注明"来源:xxx(非颗粒在线)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
(3)如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。

