 1138
2020-11-24
1138
2020-11-24
近日,中国科学院深圳先进技术研究院集成所智能仿生中心吴新宇研究团队与香港城市大学申亚京团队合作,提出一种通用、可扩展、能应对不同场景的微型机器人全新制造方式——利用胶质磁性喷雾使无生命目标物体成为可控微型外骨骼。
研究成果以An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedical applications为题发表在机器人领域顶级期刊Science Robotics上。深圳先进院尚万峰副研究员和香港城市大学杨雄为共同第一作者,吴新宇研究员和香港城市大学申亚京为共同通讯作者,其他作者包括陆豪健博士、刘雁婷博士、杨柳以及谭蓉。
微型机器人由于其良好的可控性和适应性而在生物医学中有着广泛的应用前景。但是考虑到目标对象多变的尺寸和形状,以及工作环境的非结构化和不可预测,单一机器人常难以应对不同的任务或环境。一种可扩展、通用、能应对不同场景的微型机器人制造方法仍存在很大挑战。
在自然界,很多生物本身并没有很好的运动能力,但是它们却可以通过寄生或吸附的方法利用其他生物或物体到达自身难以企及的地方, 比如,有一种彩蚴吸虫能够感染蜗牛并控制蜗牛违背原来的生活习性爬到高处。受此演化启发,团队研发了一种由聚乙烯醇(PVA)、谷蛋白(Gluten)和铁粉(Iron particles)混合而成的胶质磁性喷雾,通过对目标物体表面喷涂的方式,给它穿上一层磁性外衣(只有约100-200um厚度),可变魔术般将无生命物体变成可以磁驱的微型机器人智能体。该种磁性喷雾在固化前表现出良好的自粘性,不仅能够粘附亲水和疏水的表面,而且在磁性喷雾固化后磁性喷雾的自粘性会随之消失,即在对物体表面贴合的同时而对外界环境不表现出任何粘性。这一特征保证了外界环境不会对物体的运动造成不良影响。
这种利用物体本身结构实现运动的方法具有极强的适应性。智能仿生中心尚万峰副研究员从理论分析和有限元模拟等个多角度入手,阐明了该类喷雾磁化方法的微型机器人通用运动学和动力学模型。理论分析显示,只要在磁力矩和磁拉力作用下不同的微型机器人会依靠其本身独有的结构和形态从而产生相应的变形以及步态。为进一步验证该策略的可行性,团队使用磁性喷雾将棉线、折纸、PDMS薄膜和塑料管等各种不同材料和形状的常见物体转化为磁驱机器人,并且在磁场驱动下实现了爬行、行走、滚动、游动等运动形式,与理论分析一致。除具备良好运动能力外,覆盖在物体表面的磁性喷雾还具有可控离解,可重编程等特点,为其在生物医学领域的应用提供了很大潜力,如主动送药、可控内窥探头等。
将无生命的物体按需转化为可移动的微型机器人的策略为在不可预知的有限空间进行操作、运输和交付提供了潜力。吴新宇研究员指出:“这种‘寄生’的方式,给我们仿生机器人的设计提供了一个新的思路。我们希望能够利用该策略,拓展现有的结构仿生,在将来能够设计出具有运动能力的传感器、微外骨骼等。”
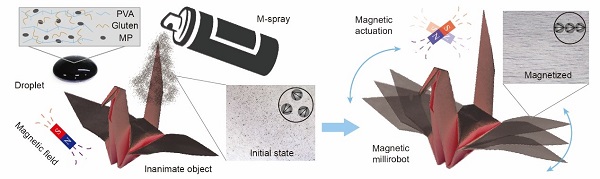
图1. 磁性喷雾将无生命物体转变为磁控微型机器人的过程
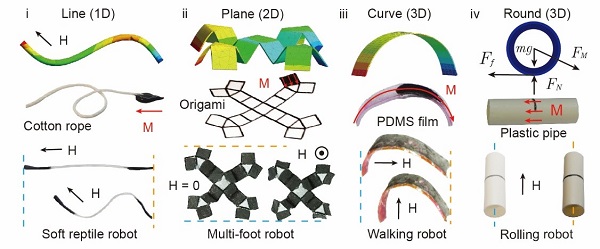
图2. 磁性喷雾将不同材料和形状的目标物体变为磁控微型机器人

图3. 覆盖在目标物体表面的磁性喷雾在振荡磁场下解体
版权与免责声明:
(1) 凡本网注明"来源:颗粒在线"的所有作品,版权均属于颗粒在线,未经本网授权不得转载、摘编或利用其它方式使用上述作品。已获本网授权的作品,应在授权范围内使用,并注明"来源:颗粒在线"。违反上述声明者,本网将追究相关法律责任。
(2)本网凡注明"来源:xxx(非颗粒在线)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
(3)如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。

